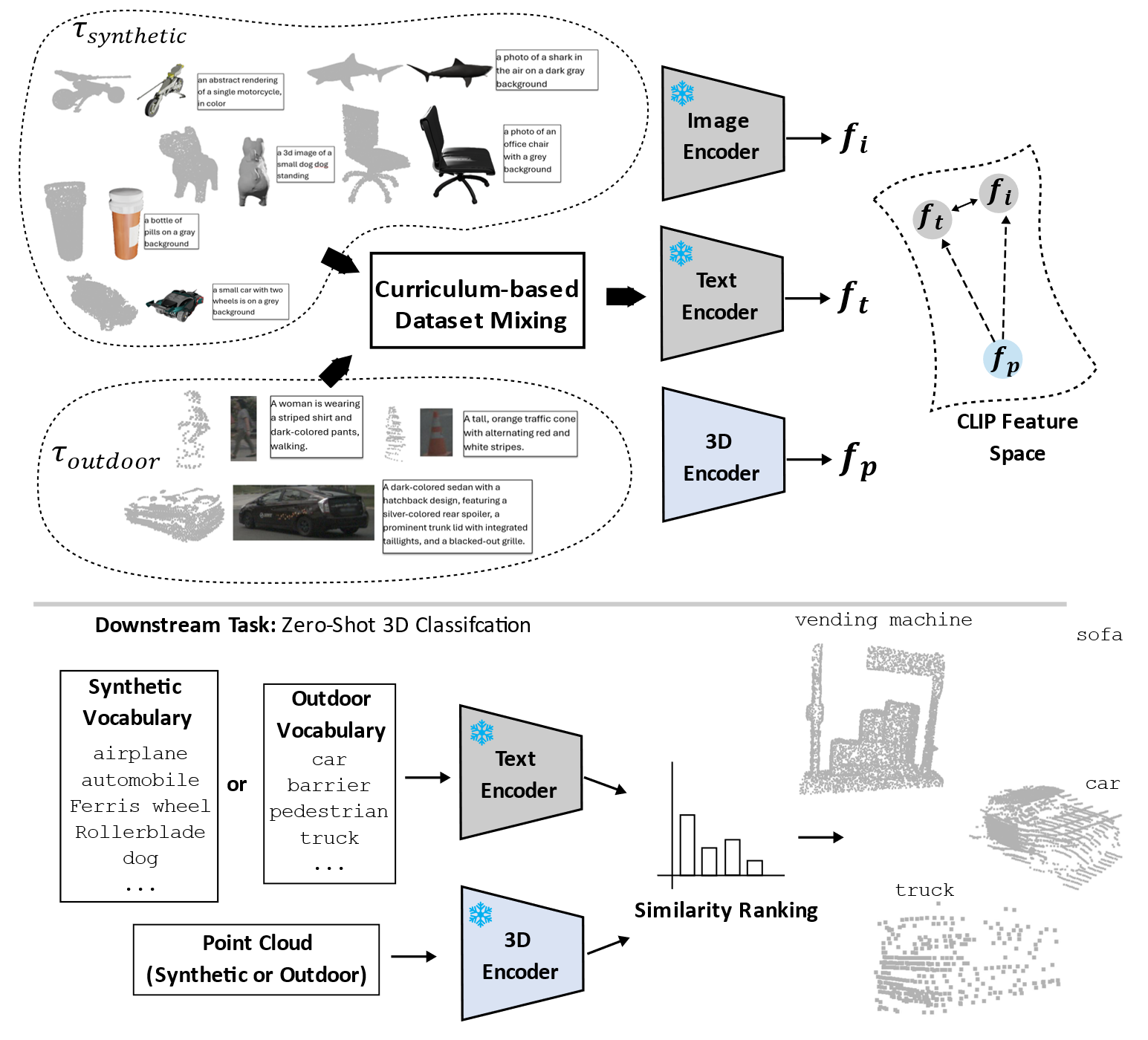
@article{khoche2025blendclip,title={BlendCLIP: Bridging Synthetic and Real Domains for Zero-Shot 3D Object Classification with Multimodal Pretraining},author={Khoche, Ajinkya and L{\'a}szl{\'o} Nagy, Gerg{\H{o}} and Wozniak, Maciej and Gustafsson, Thomas and Jensfelt, Patric},journal={arXiv preprint arXiv:2510.18244},year={2026},}
2025
Under Review
DoGFlow: Self-Supervised LiDAR Scene Flow via Cross-Modal Doppler Guidance
Ajinkya Khoche, Qingwen Zhang, Yixi Cai, and 2 more authors
@article{khoche2025dogflow,title={DoGFlow: Self-Supervised LiDAR Scene Flow via Cross-Modal Doppler Guidance},author={Khoche, Ajinkya and Zhang, Qingwen and Cai, Yixi and Mansouri, Sina Sharif and Jensfelt, Patric},journal={arXiv preprint arXiv:2508.18506},year={2025},}
T-RO 2025
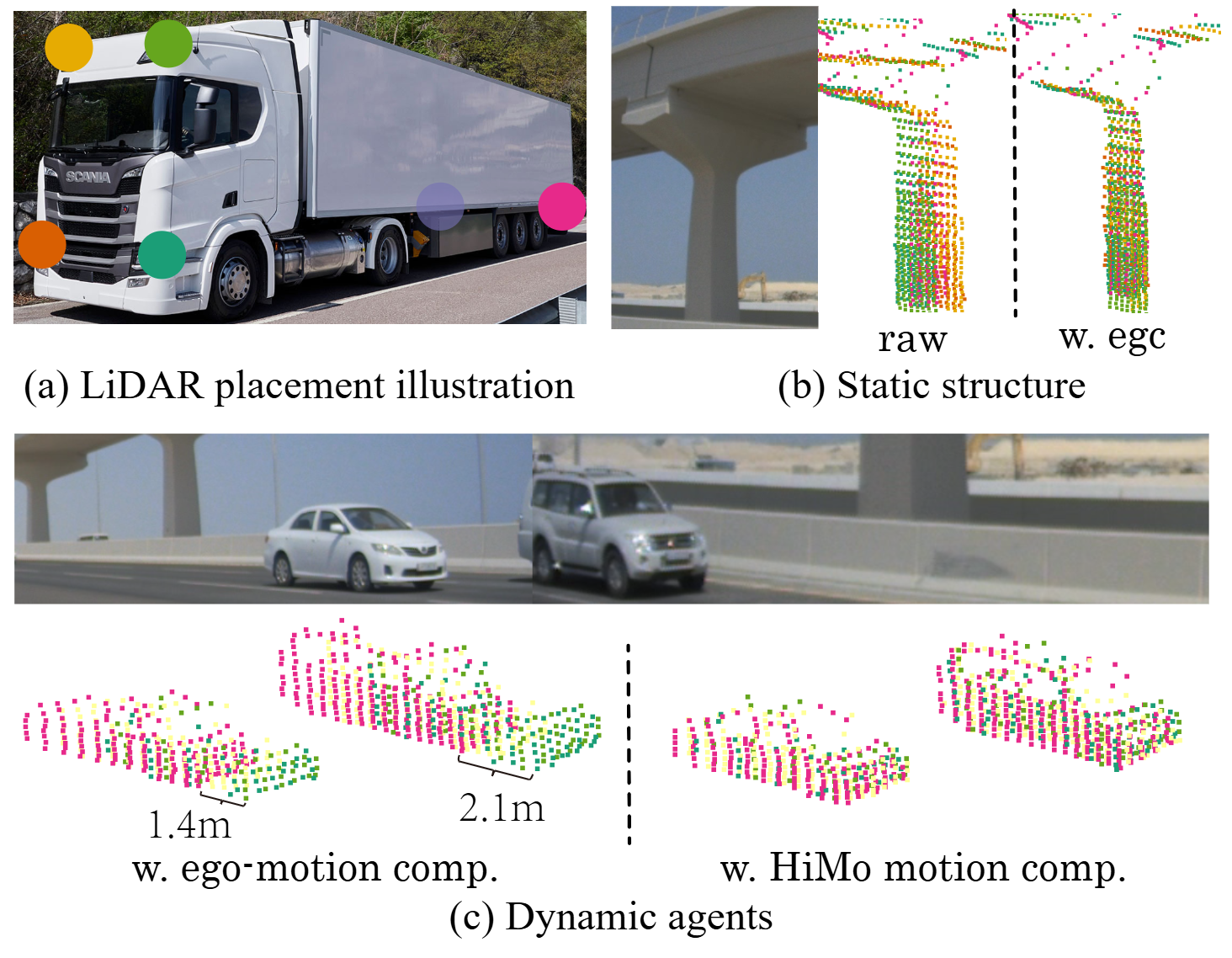
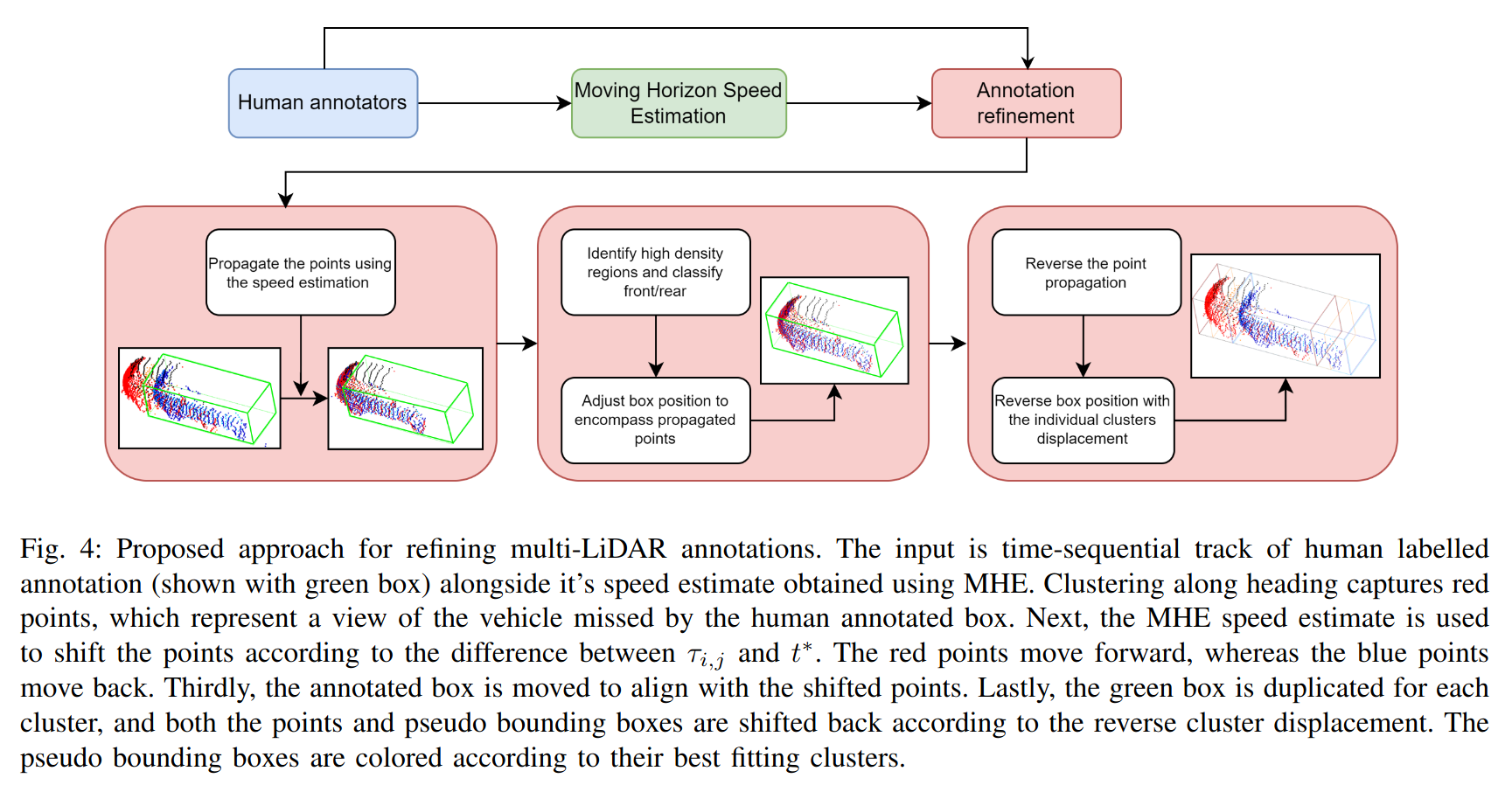
HiMo: High-Speed Objects Motion Compensation in Point Clouds
Qingwen Zhang, Ajinkya Khoche, Yi Yang, and 4 more authors
@article{zhang2025himo,title={HiMo: High-Speed Objects Motion Compensation in Point Clouds},author={Zhang, Qingwen and Khoche, Ajinkya and Yang, Yi and Ling, Li and Mansouri, Sina Sharif and Andersson, Olov and Jensfelt, Patric},journal={IEEE Transactions on Robotics},year={2025},}
ICRA 2025
SSF: Sparse Long-Range Scene Flow for Autonomous Driving
Ajinkya Khoche, Qingwen Zhang, Laura Pereira Sanchez, and 3 more authors
@article{khoche2025ssf,title={SSF: Sparse Long-Range Scene Flow for Autonomous Driving},author={Khoche, Ajinkya and Zhang, Qingwen and Sanchez, Laura Pereira and Asefaw, Aron and Mansouri, Sina Sharif and Jensfelt, Patric},booktitle={2025 IEEE International Conference on Robotics and Automation (ICRA)},year={2025},keywords={Point cloud compression;Measurement;Three-dimensional displays;Codes;Convolution;Scalability;Pipelines;Estimation;Feature extraction;Robotics and automation},doi={10.1109/ICRA55743.2025.11128770},}
2024
ECC 2024
Addressing Data Annotation Challenges in Multiple Sensors: A Solution for Scania Collected Datasets
Ajinkya Khoche, Aron Asefaw, Alejandro González, and 3 more authors
@inproceedings{khoche2024addressing,title={Addressing Data Annotation Challenges in Multiple Sensors: A Solution for Scania Collected Datasets},author={Khoche, Ajinkya and Asefaw, Aron and Gonz{\'a}lez, Alejandro and Timus, Bogdan and Mansouri, Sina Sharif and Jensfelt, Patric},booktitle={2024 European Control Conference (ECC)},pages={1032--1038},year={2024},organization={IEEE},}
IV 2024
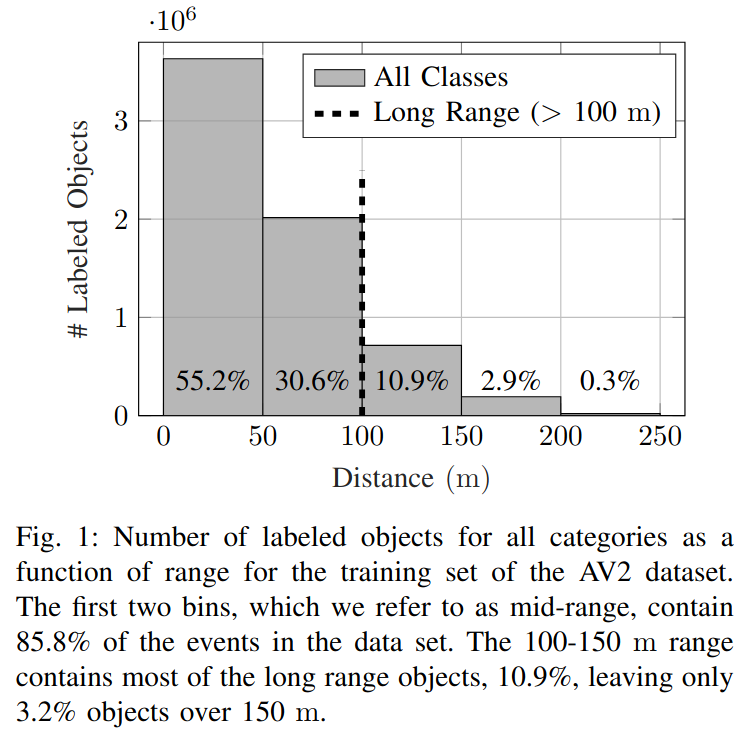
Towards long-range 3d object detection for autonomous vehicles
Ajinkya Khoche, Laura Pereira Sánchez, Nazre Batool, and 2 more authors
In 2024 IEEE Intelligent Vehicles Symposium (IV), 2024
@inproceedings{khoche2024towards,title={Towards long-range 3d object detection for autonomous vehicles},author={Khoche, Ajinkya and S{\'a}nchez, Laura Pereira and Batool, Nazre and Mansouri, Sina Sharif and Jensfelt, Patric},booktitle={2024 IEEE Intelligent Vehicles Symposium (IV)},pages={2206--2212},year={2024},organization={IEEE},}
2022
IV 2022
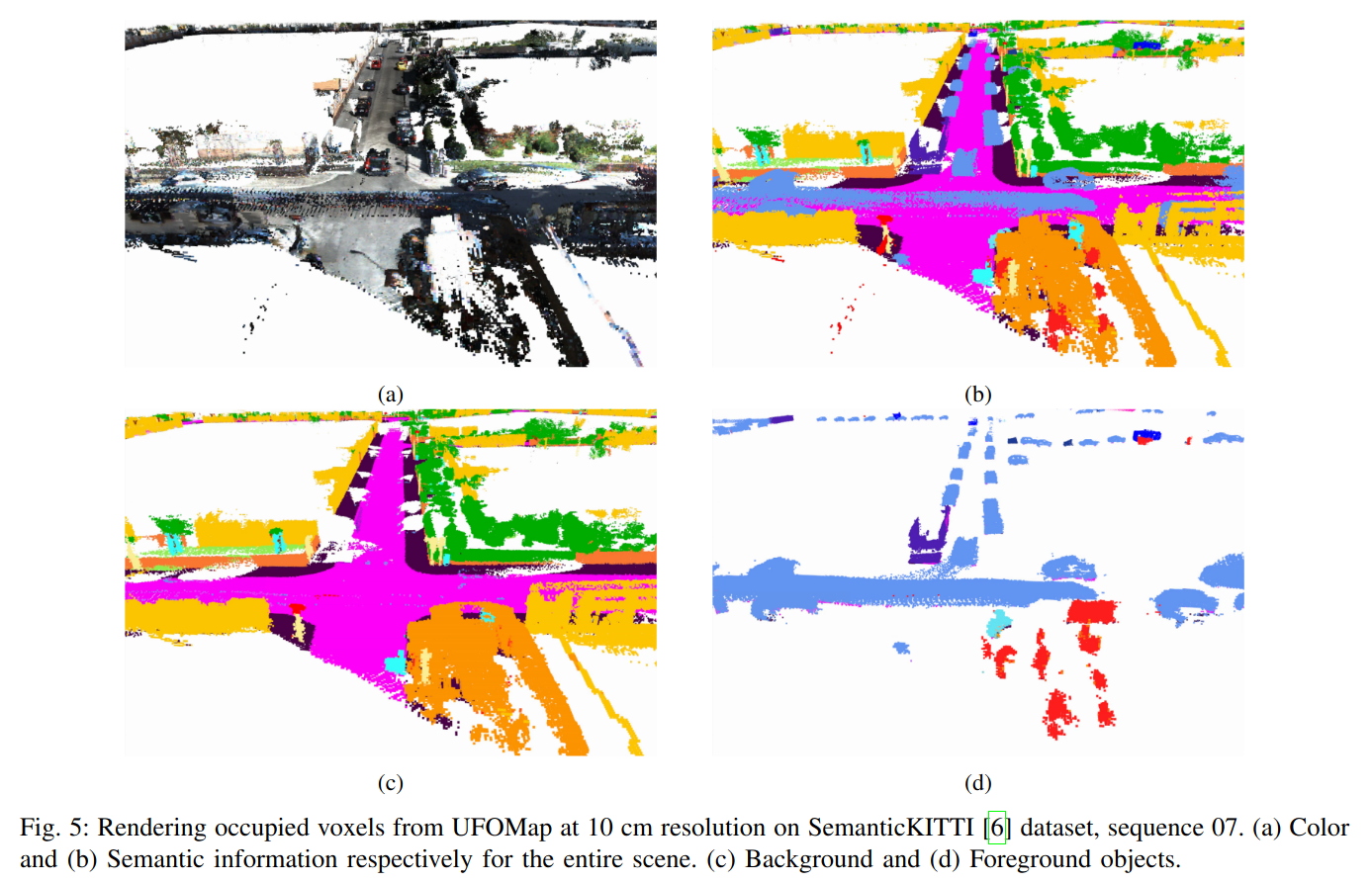
Semantic 3d grid maps for autonomous driving
Ajinkya Khoche, Maciej K Wozniak, Daniel Duberg, and 1 more author
In 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), 2022
@inproceedings{khoche2022semantic,title={Semantic 3d grid maps for autonomous driving},author={Khoche, Ajinkya and Wozniak, Maciej K and Duberg, Daniel and Jensfelt, Patric},booktitle={2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC)},pages={2681--2688},year={2022},organization={IEEE},}
2020
M.Sc. Thesis
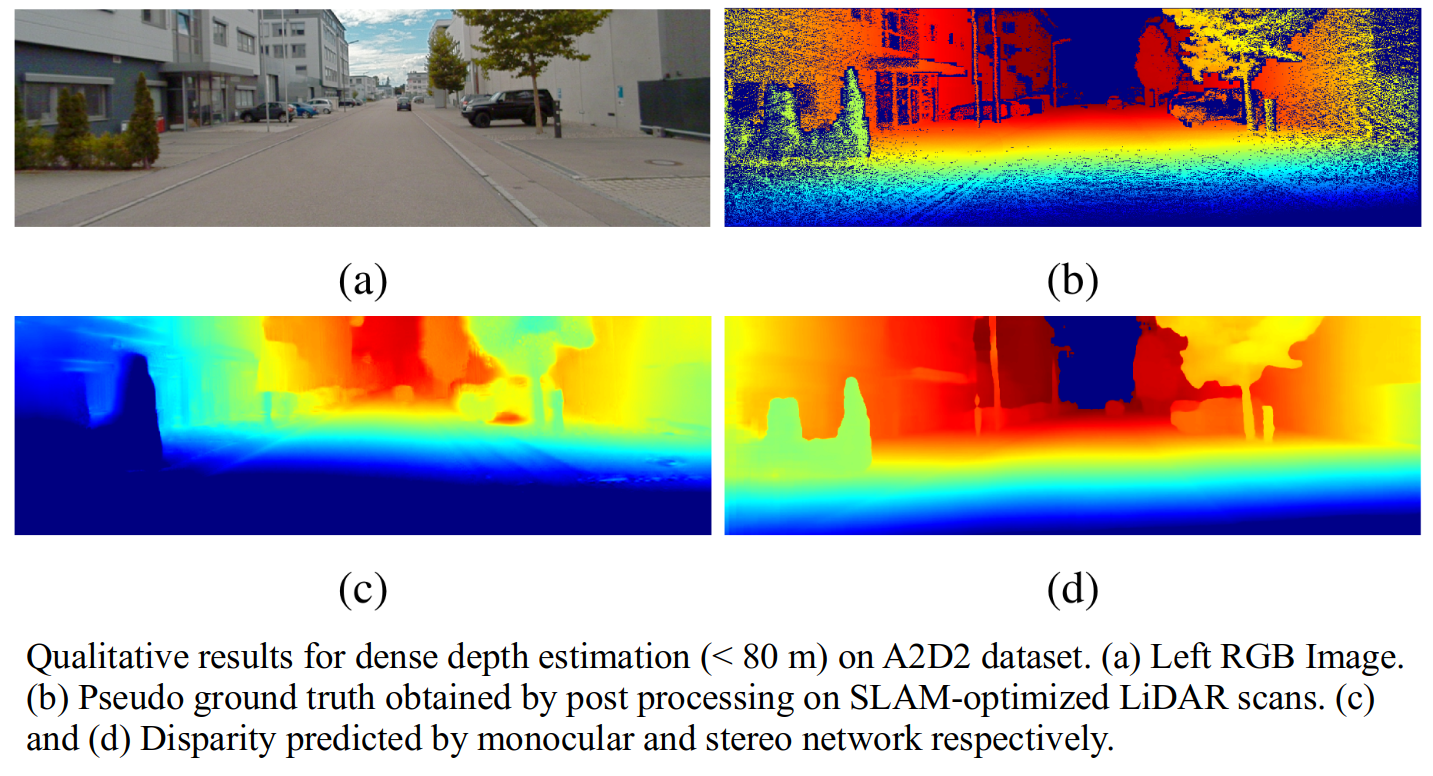
Depth Estimation from Images using Dense Camera-Lidar Correspondences and Deep Learning
Ajinkya Khoche
KTH, School of Electrical Engineering and Computer Science (EECS), 2020
@mastersthesis{Khoche1417257,author={Khoche, Ajinkya},institution={KTH, School of Electrical Engineering and Computer Science (EECS)},school={KTH, School of Electrical Engineering and Computer Science (EECS)},title={Depth Estimation from Images using Dense Camera-Lidar Correspondences and Deep Learning},series={TRITA-EECS-EX},number={2020:12},year={2020},}