Ajinkya Khoche

Lindstedtsvägen 24
Stockholm, Sweden
I’m a PhD candidate at the division of Robotics Perception and Learning at KTH, supervised by Prof. Patric Jensfelt and Dr. Sina Sharif Mansouri. My thesis focuses on long-range perception for autonomous trucking. My work is part of the ProSense project, supported by Vinnova.
During my PhD thesis, I have explored topics in scene perception, including object detection, segmentation and scene flow. I am also interested in 3D forecasting, scene rendering and world models. I am passionate about developing deployable and scalable methods that are robust to adverse weather and long-tail. I have experience in working with various sensors like LiDAR, cameras, and radar.
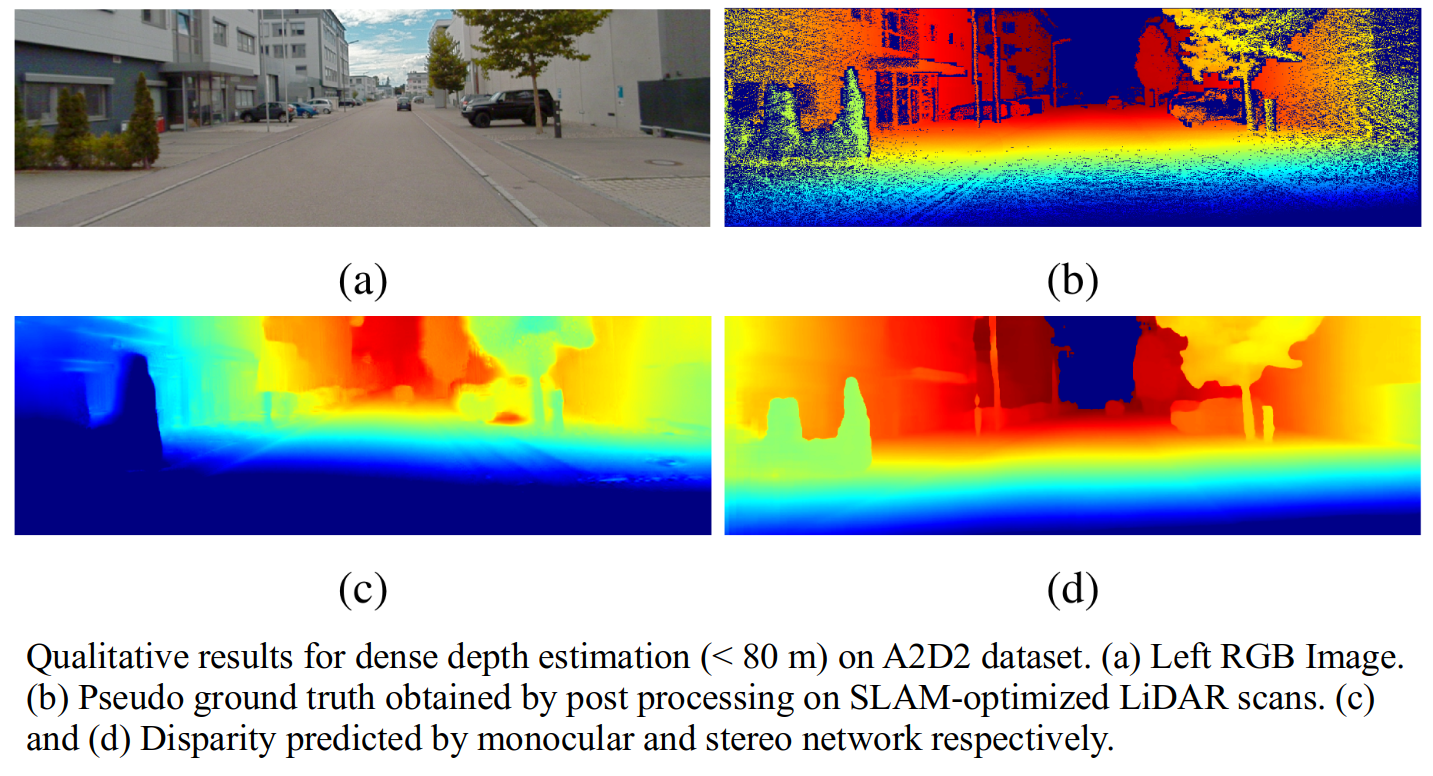
Previously, I graduated with M.Sc. in Systems, Controls and Robotics from KTH. My M.Sc. thesis explored depth estimation supervised using dense correspondences between image and SLAM-processed LiDAR under supervision of Dr. Mentar Mahmoudi at Audi Electronic Ventures, Ingolstad. I also hold B.Tech. + M.Tech, in Mechanical Engineering from Indian Institute of Technology, Kharagpur.
news
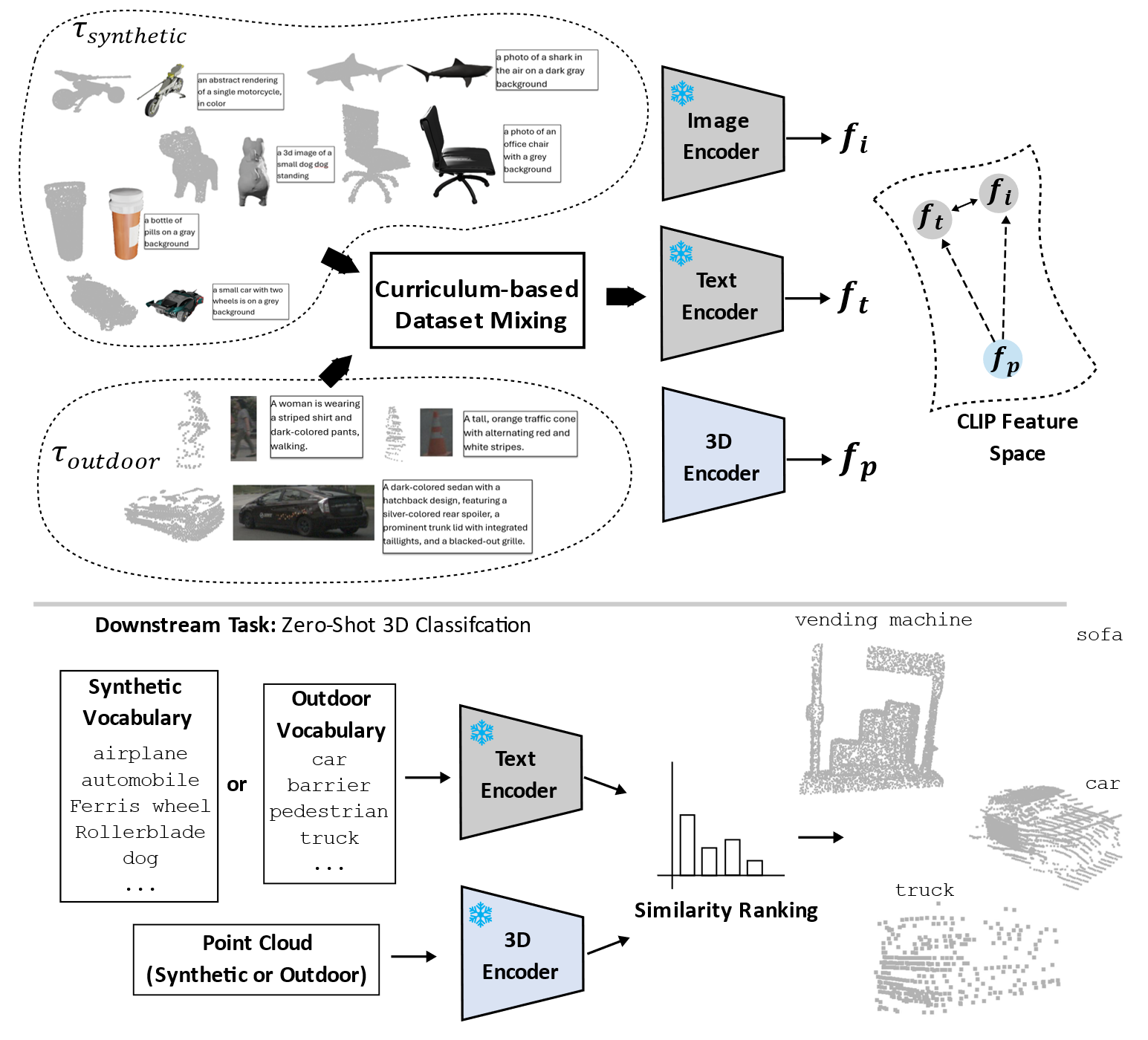
| Oct 13, 2025 | I’ll be presenting BlendCLIP: Bridging Synthetic and Real Domains for Zero-Shot 3D Object Classification with Multimodal Pretraining as an extended abstract at the 5th Workshop on Open-World 3D Scene Understanding with Foundation Models (OpenSUN3D). Come visit Hall II, Board #155 (19th Oct 15:00–16:00). Stay tuned for code release. |
|---|---|
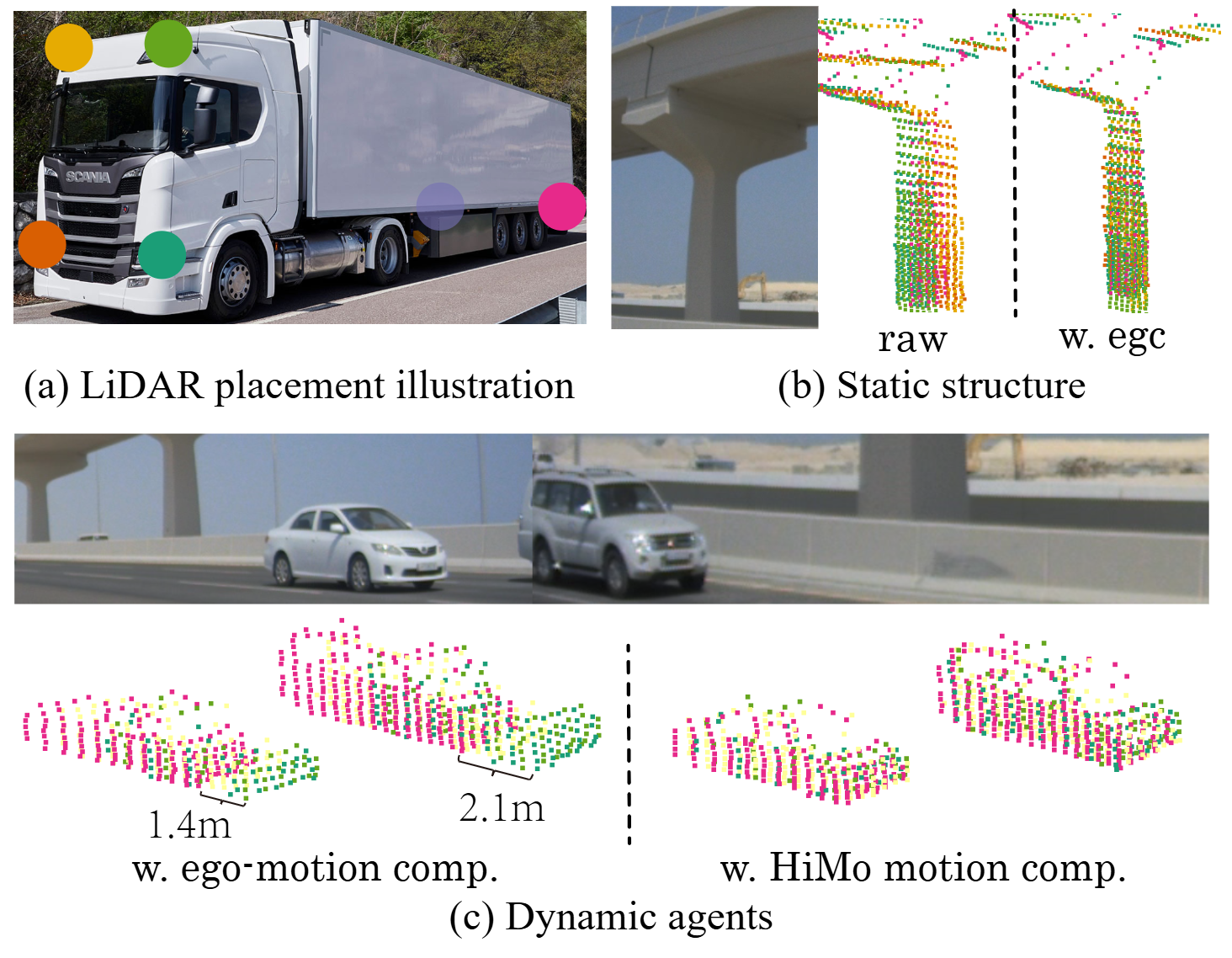
| Aug 21, 2025 | Our paper HiMo: High-Speed Objects Motion Compensation in Point Clouds is accepted to Transactions on Robotics (T-RO) journal. Stay tuned for dataset release! |
| Jan 31, 2025 | Our paper SSF: Sparse Long-Range Scene Flow for Autonomous Driving is accepted to ICRA 2025. Source code is released here. See you in Atlanta! |
| Jun 02, 2024 | Reporting from beautiful Jeju in South Korea. I’m here to present our paper Towards long-range 3d object detection for autonomous vehicles, accepted in IV 2024. Later during the month I’ll be at ECC 2024 in Stockholm to present another accepted paper Addressing Data Annotation Challenges in Multiple Sensors: A Solution for Scania Collected Datasets |
| Jun 06, 2022 | Semantic 3d grid maps for autonomous driving is accepted to ITSC 2022! |